iMap: A Novel Method for Statistical Fixation Mapping of Eye Movement data
Version 4
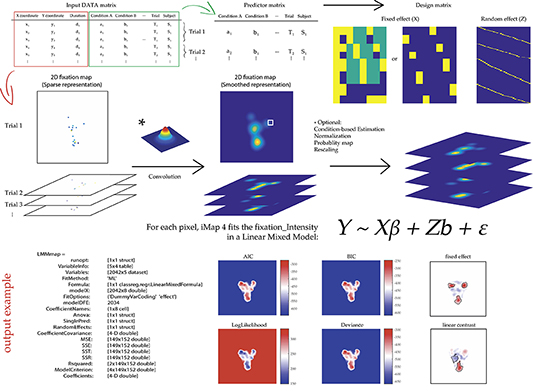
Eye movement data analyses are commonly based on the probability of occurrence of saccades and fixations (and their characteristics) in given Regions of Interest (ROIs). We implemented an alternative data-driven method to compute statistical fixation maps of eye movements - iMap - based on an approach inspired by methods used in functional Magnetic Resonance Imaging.
iMap 4 implements a GUI and new statistical Linear Mixed Modeling approach compared to the previous versions:
Please note that iMap 4.0 requires Matlab 2013b (version 8.2) or above with the Image Processing Toolbox and the Statistics Toolbox. If your Matlab environment is equipped with the Parallel Computing Toolbox, some functions will launch in parallel to speed up the computations. If you use it, please cite it as it follows:
Lao, J., Miellet, S., Pernet, C., Sokhn, N., & Caldara, R. (in press). iMap4: An Open Source Toolbox for the Statistical Fixation Mapping of Eye Movement data with Linear Mixed Modeling. Behavior Research Methods. [PDF]
We also recommend to carefully read the new manual, as well as the papers below, before using it:
Caldara, R., & Miellet, S. (2011). iMap: A Novel Method for Statistical Fixation Mapping of Eye Movement data, Behavior Research Methods, 43(3), 864-78 [PDF]
Miellet, S., Lao, J., Caldara, R. (2014). An appropriate use of iMap produces correct statistical results: a reply to McManus (2013) iMAP and iMAP2 produce erroneous statistical maps of eye-movement differences. Perception, 43, 451-457. [PDF]
PLEASE USE THE DOWNLOAD LINK ON THE LEFT HAND SIDE TO DOWNLOAD iMAP
PREVIOUS VERSIONS
We have received feedback and queries from different users. Following our discussions we have implemented significant changes from the original Version 1 code.
If you are interested to access a previous version of the iMap toolbox, please contact us by email. Please note that we strongly discourage users to use them for a scientific purpose, as they might contain bugs and statistical approaches we do not encourage to use anymore.
We wish to sincerely thank all the users that sent us comments.
Version 3
1. New "statistical engine". iMap3 now uses t-tests and bootstrapped TFCE transformedscores to correct for multiple comparisons (TFCE: threshold-free clusterenhancement;Smith & Nichols, 2009), instead of being based on the Random FieldTheory (used in previous versions up to iMap2.1).The associated benefits are: a) a more appropriate and direct estimate of data variability,b) specific tests for independent and paired samples, c) a better control for falsepositives.Many thanks to Cyril R. Pernet and Guillaume A. Rousselet for their help with theimplementation of this approach.We are also grateful to Chris McManus for the careful reading of the original version ofiMap, which stimulated our development of the new version of this toolbox.
2. A bug due to the impossibility of calculating effect sizes when there is no effect hasbeen fixed.
3. This version includes an option to generate the raw fixation maps.
4. This version no longer creates temporary working files.
5. A normalization of the individual maps is done across the search space in order torepresent the individual fixation bias.
6. Improved appearance of the statistical fixation maps.
7. Possibility to set the transparency of the background image and the statistical maps.
Version 2.1
1. Solve potential problems related with when the dimensions (x,y) of the search space, in case they do not have an even numbers of pixels.
Version 2
1. The setting of the parameters is now done via a configuration structure (see examples), which allows more flexibility in calling iMap, but gives also to the user flexibility in inserting his own parameters.
2. New parameters have been added for: setting the colorbar scaling, setting the sigma (kernel for the statistical smoothing), setting the significancy of the threshold.
3. The "clicking step" used to generate the maps is no longer necessary. Many thanks to Junpeng Lao who wrote the ‘indtorgb’ function.
4. The one-tailed and two-tailed critical values (found in Zcrit.txt or displayed in the Matlab command window) are defined from the value of the significancy threshold set as one of the parameters.
6. The contours for significant areas are now displayed in white for all the fixation maps. It should improve the view of the significant areas.
7. A mistake in the data preparation code for the scenes example has been fixed.
Version 1.1
1- Fixes potential problems with floating point in the calculation of the search-space size
2- Creates a Zcrit.txt file indicating the size of the search-space, the critical value of a one-tailed Z for alpha = .05 (significancy threshold for the individual maps), the critical value of a two-tailed Z for alpha = .05 (significancy threshold for the difference map). This information is also displayed in the Matlab command window.
3- The CiVol and STAT_THRESHOLD functions have been modified to avoid the display of confusing information in the Matlab command window.
Feel free to contact us to provide comments, as we aim at continuing the development of the toolbox in the future, as well as implementing new plug-ins... just stay tuned.
DISCLAIMER
The iMap4 Source code is covered by the BSD License.
Copyright (c) 2015, Junpeng Lao, Sébastien Miellet, Cyril Pernet, Nayla Sokhn, and Roberto Caldara
All rights reserved.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
* Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer.
* Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution
* Neither the name of the University of Fribourg nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.